The chinese LP ant motors are actually 0.5A stall on 2 cell btw :L
Another New Nanoweight...
Moderators: BeligerAnt, petec, administrator
Re: Another New Nanoweight...
The only reason I know it's 0.8A stall is that I did test it (it's 1.2A on 2 cell)  It's still less powerful than an ant motor of equivalent stall as Power = current x voltage and it's running half the voltage, and these motors are probably quite a bit less efficient (they get quite warm)... but they do still have a fair bit of power (peak of 3.2W if taken under ideal circumstances). The output on 2 cell is probably roughly equivalent to a LP gear motor with a 10:1 gearbox.
It's still less powerful than an ant motor of equivalent stall as Power = current x voltage and it's running half the voltage, and these motors are probably quite a bit less efficient (they get quite warm)... but they do still have a fair bit of power (peak of 3.2W if taken under ideal circumstances). The output on 2 cell is probably roughly equivalent to a LP gear motor with a 10:1 gearbox.
The chinese LP ant motors are actually 0.5A stall on 2 cell btw :L
The chinese LP ant motors are actually 0.5A stall on 2 cell btw :L
Rory Mangles - Team Nuts
Robots: Nuts 2 and many more...
NanoTwo Motor Controllers: https://nutsandbots.co.uk/product/nanotwodualesc
Robots: Nuts 2 and many more...
NanoTwo Motor Controllers: https://nutsandbots.co.uk/product/nanotwodualesc
-
AntRoboteer
- Posts: 441
- Joined: Mon Mar 03, 2014 7:01 pm
Re: Another New Nanoweight...
Wow. That's crazy! Seeing as I use NiMH batteries (up to 6v), my stall currents should be a bit less than the stall on a 2 cell LiPo luckily. I'm going to try and use a 4.8v battery for this so it should be around 1A then per motor. That's quite a bit; I've never used motors that require so much power and have such a high stall current! And strangely the chinese motors I use claim to have a 360mA stall at 6v which seems about right but that could all be false information and I don't have an ammeter to test them with to verify it.
I was wondering if anyone had tried wiring up a 4WD seup in series because that would halve the voltage going through them while keeping the current the same if I'm not mistaken. However, would this work for stall current? If it did, I'm fine with running these ultra fast motors on 2.4v or 3v each which should slow them down a bit and ake my robots drivable. Is that all nonsense or is there any fact in there at all? I would be keen to try a new method like that out, especially if it meant I wouldn't need better servo boards for my 4WD setup!
I was wondering if anyone had tried wiring up a 4WD seup in series because that would halve the voltage going through them while keeping the current the same if I'm not mistaken. However, would this work for stall current? If it did, I'm fine with running these ultra fast motors on 2.4v or 3v each which should slow them down a bit and ake my robots drivable. Is that all nonsense or is there any fact in there at all? I would be keen to try a new method like that out, especially if it meant I wouldn't need better servo boards for my 4WD setup!
Re: Another New Nanoweight...
360mA is probably about right on 6v; 2 cell lipos are 8v so brings up the current a bit.
I just tested two of those drive unit motors in a series. The theory works; they draw 0.4A when both at stall, however it acts a bit like a car differential; when you slow one, the other gets faster. If there's no load on one then the other has no torque (not even enough to get it moving again from stall sometimes).
It'll work as long as you can keep all 4 wheels off the ground, however if someone lifts your front wheels off the ground, the rear wheels'll have no power. Just try it I'd say, if not, just go back to parallel and just try not to stall all four at once; Servo boards are less than a pound each, so if it kills one then you'll just have to come up with something else :L
I just tested two of those drive unit motors in a series. The theory works; they draw 0.4A when both at stall, however it acts a bit like a car differential; when you slow one, the other gets faster. If there's no load on one then the other has no torque (not even enough to get it moving again from stall sometimes).
It'll work as long as you can keep all 4 wheels off the ground, however if someone lifts your front wheels off the ground, the rear wheels'll have no power. Just try it I'd say, if not, just go back to parallel and just try not to stall all four at once; Servo boards are less than a pound each, so if it kills one then you'll just have to come up with something else :L
Rory Mangles - Team Nuts
Robots: Nuts 2 and many more...
NanoTwo Motor Controllers: https://nutsandbots.co.uk/product/nanotwodualesc
Robots: Nuts 2 and many more...
NanoTwo Motor Controllers: https://nutsandbots.co.uk/product/nanotwodualesc
-
AntRoboteer
- Posts: 441
- Joined: Mon Mar 03, 2014 7:01 pm
Re: Another New Nanoweight...
Awesome! My only theory that has ever worked!
It would be very interesting to try and indeed why not? I am curious about those effects you have described right there and if I can get a low scoop then it should prevent the wheels being lifted off of the ground. Thanks for testing that for me and for the advice. I'll give it a go and see what happens!
It would be very interesting to try and indeed why not? I am curious about those effects you have described right there and if I can get a low scoop then it should prevent the wheels being lifted off of the ground. Thanks for testing that for me and for the advice. I'll give it a go and see what happens!
Re: Another New Nanoweight...
is there anywhere that sells servo boards on their own without the rest of the servo? also, does anybody have a diagram of how to modify them. i know you have to remove the potentiometre and replace it with resistors but i don't know which bit the potentiometre is.  i would like to be able to build nanos myself but i'm not too good at electronics. also, how would i get mixing on a servo board?
i would like to be able to build nanos myself but i'm not too good at electronics. also, how would i get mixing on a servo board?
Daniel Jackson.
Team Hectic.
Many antweights
Super antweights: territorial.
Fleaweights: fleadom fighter, gaztons.
Featherweights: hectic (under construction)
Team Hectic.
Many antweights
Super antweights: territorial.
Fleaweights: fleadom fighter, gaztons.
Featherweights: hectic (under construction)
Re: Another New Nanoweight...
You can't get them by themselves, but the blue servos like the ne in the pic are less than £1 each... You can't buy servo boards without the servo either; that's just called an ESC by that point and tend to be larger and more expensive :L
The potentiometer is the bit with the 3 red wires going to it in this photo :
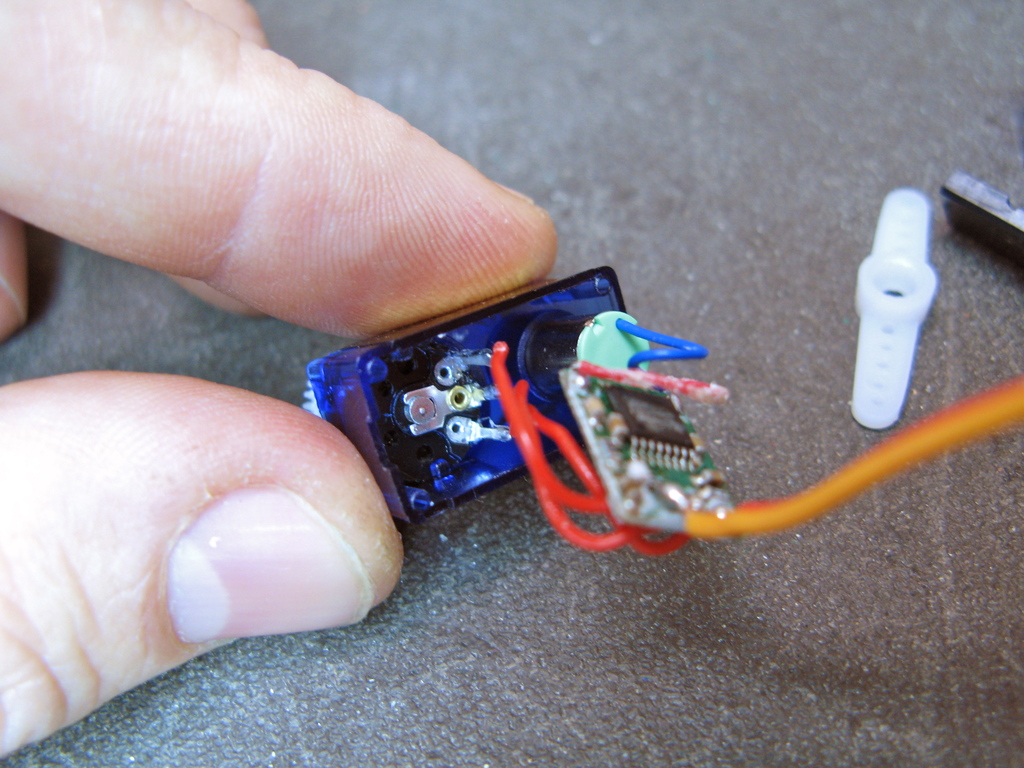
You can just solder the two resistors straight onto the red wires if you don't trust yourself to solder to the board (you could probably do with a better tip for your soldering iron having seen the soldering in Hogi :L)
Mixing has to be done with a V-tail mixer, which is a pain as they almost double the cost of parts (even though they're only ~£3 :L). The only modding they require is cutting the connectors off and soldering the wires straight to it so they fit better in the Nano...
In other news, I spent much of last night upgrading Scampi... More details later
The potentiometer is the bit with the 3 red wires going to it in this photo :
You can just solder the two resistors straight onto the red wires if you don't trust yourself to solder to the board (you could probably do with a better tip for your soldering iron having seen the soldering in Hogi :L)
Mixing has to be done with a V-tail mixer, which is a pain as they almost double the cost of parts (even though they're only ~£3 :L). The only modding they require is cutting the connectors off and soldering the wires straight to it so they fit better in the Nano...
In other news, I spent much of last night upgrading Scampi... More details later
Rory Mangles - Team Nuts
Robots: Nuts 2 and many more...
NanoTwo Motor Controllers: https://nutsandbots.co.uk/product/nanotwodualesc
Robots: Nuts 2 and many more...
NanoTwo Motor Controllers: https://nutsandbots.co.uk/product/nanotwodualesc
-
peterwaller

- Posts: 3213
- Joined: Fri Feb 15, 2002 12:00 am
- Location: Aylesbury Bucks
- Contact:
Re: Another New Nanoweight...
Your theory is not quite right AntRoboteer.
If you put two motors in series you get half the voltage across each motor which means half the current through them as well.
As power is voltage x current you only get a quarter of the power in each motor.
Happy Birthday Rory
If you put two motors in series you get half the voltage across each motor which means half the current through them as well.
As power is voltage x current you only get a quarter of the power in each motor.
Happy Birthday Rory
-
AntRoboteer
- Posts: 441
- Joined: Mon Mar 03, 2014 7:01 pm
Re: Another New Nanoweight...
Aha! Thought there was something that didn't quite look right! Thanks for that Pete!
And yes, happy birthday Rory!
And yes, happy birthday Rory!
Re: Another New Nanoweight...
I've spent about 5 hours on this thing.... Totally worth it


It's kinda a cross between Dan's and Andy's walking mechanism, and somehow it actually works really well Most of my box of paperclips was used in the construction of this thing :L
However really annoyingly, I made the front polycarb brace so that it'd fit in the cube, however forgot to take into account the legs themselves, so it doesn't quite fit in the cube without bending most of the mechanism out of shape. It is in weight at 28g, but it may have to stay as just an awesome tiny walking thing, or a really light fleaweight
Here's a video: https://www.youtube.com/watch?v=wGolhbK ... e=youtu.be
It's kinda a cross between Dan's and Andy's walking mechanism, and somehow it actually works really well
However really annoyingly, I made the front polycarb brace so that it'd fit in the cube, however forgot to take into account the legs themselves, so it doesn't quite fit in the cube without bending most of the mechanism out of shape. It is in weight at 28g, but it may have to stay as just an awesome tiny walking thing, or a really light fleaweight
Here's a video: https://www.youtube.com/watch?v=wGolhbK ... e=youtu.be
Rory Mangles - Team Nuts
Robots: Nuts 2 and many more...
NanoTwo Motor Controllers: https://nutsandbots.co.uk/product/nanotwodualesc
Robots: Nuts 2 and many more...
NanoTwo Motor Controllers: https://nutsandbots.co.uk/product/nanotwodualesc