We are going for Standard weight class (3kg 20x20cm) and with 1 sonar, 3 edge senors and 2 motors with alot of torque (dont know brand or name).
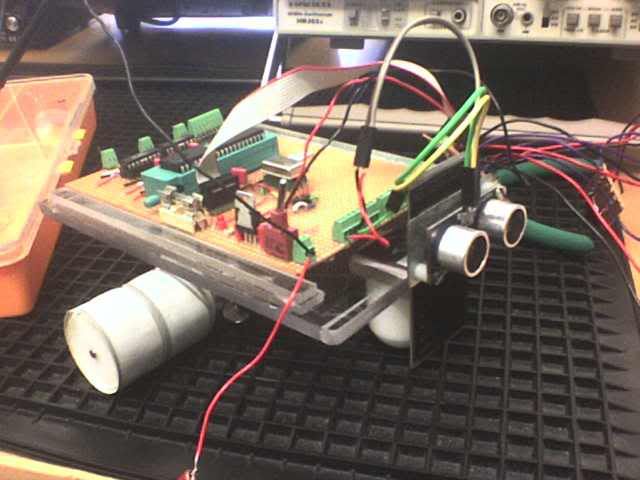
(Current looks. this is just the test plate to see if the edge sensor and sonar works)
At the moment we got problems with detection. It does see an object and goes for it, but when the object is out of "sight" it dosent know what to do next. Currently we set it to turn around and look, but this can bring the oppenent to a easy victory, and we use all the timers thats avaible on the AtMega16l chip so we got no more room for another sonar or such.




