The design should make it invertable.
Chassis and arms are going to be made from 1.5mm Carbon Fibre.
Motors will be HP 50:1 Micro Gear motors.
Outrunner motor from Robot Birds (which they don't appear to sell anymore!)
Battery is a 240mAh Hyperion LiPo.
Speed Controller will be an option D from Pete most likely.
What ever weight I've got left at this point will then determine the final blade design but will be looking to get something made up in titanium hopefully.
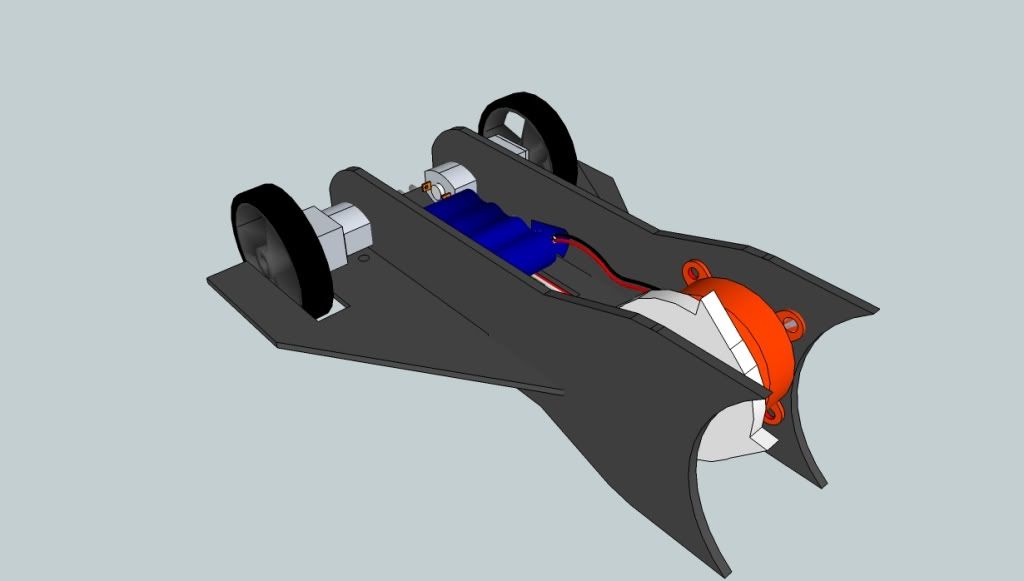
Original mock up looked like this

More photos to come shortly.
Oh and I've now had a request for a tracked robot!!
Dave




{kind=link}
{kind=link}