Help/Build diary for/of my first antweight.
Moderators: BeligerAnt, petec, administrator
-
BeligerAnt

- Posts: 1872
- Joined: Wed May 15, 2002 12:00 am
- Location: Brighton
- Contact:
Re: Help/Build diary for/of my first antweight.
If you fix polycarb at two ends at different angles it will naturally form a curve  Take a look at Pants or Make-A-Bot to see how it works. It won't break even if you form it into a sharp bend, so a gentle curve is no problem.
Take a look at Pants or Make-A-Bot to see how it works. It won't break even if you form it into a sharp bend, so a gentle curve is no problem.
Gary, Team BeligerAnt
Re: Help/Build diary for/of my first antweight.
Yo! I'm back for another update. It's been a while but sadly life got in the way of robots. I've finally figured out the dimensions that I'm happy with for everything except the flipping blade on the rear hinged end but because I've got a little space to spare in the cube and cardboard isn't the best for that kind of shape I'll work out the specifics of it when I get to the polycarb. Below are some different angles of the new mockup and an earlier sketchup version too. Once I get the money together I'll start ordering parts and then I'll build my bot proper. I'm still kind of unsure on how to hinge the flipper though but I think I could probably get away with using a rod of some sort through the front and attaching it that way. the servo linkage is also something I'll finalise when I get to it but with the final shape of it set it should be easier to experiment and I think I have enough space to try a few different orientations with it.







Harry
Re: Help/Build diary for/of my first antweight.
Ok so I'm back again, this time with a shopping list!
Nanotwo kit:
no real URL for this except the thread where rory announced it or the email address you send your order to
Battery Bag(apparently you need one of these):
https://hobbyking.com/en_us/lithium-pol ... -sack.html
LiPo Charger:
https://hobbyking.com/en_us/turnigy-12v ... arger.html
Power for the charger:
https://www.amazon.co.uk/Kasstino-Adapt ... wer+supply
LiPo:
https://hobbyking.com/en_us/turnigy-nan ... tore=en_us
Flipper Servo:
https://hobbyking.com/en_us/turnigytm-t ... tore=en_us
1.5mm Polycarb:
http://www.ebay.co.uk/itm/LEXAN-POLYCAR ... 53e5d55427
1mm Aluminium
http://www.ebay.co.uk/itm/like/26124836 ... 0213340945
Transmitter:
https://www.amazon.co.uk/gp/product/B00 ... UTF8&psc=1
I've read around and I'm 90% sure that this will all work together. the aluminium is for the tips of each wedge so that I can sharpen it and have a nice low ground clearance. I do still have a couple questions though as I don't wanna spend money on something and then find out that I needed something else and I wasted it or that I missed something crucial. so in no particular order;
1. Do I need some sort of switch or link for safety and does the Nanotwo kit come with anything like that already?
2. if not then would I need a soldering iron to attach one? as I don't currently own one.
3. is the LiPo charging bag something that's definitely required or is it just there for people who worry too much?
4. How would I attach one of those linkage rods to the servo and flipper? would I need a hook-ey type thing on the flipper or something else?
Alright I think that's everything. Please let me know what you think and if there's anything that you'd do differently. if nobody comes in and tells me to stop what I'm doing immediately because I've made a terrible mistake in component choice or it's gonna explode or something then I'll probably order everything and get started building it in a week or so. So stay tuned for more riveting action such as me asking how to do a thing or posting a drawing of how I will accomplish a thing. and I'll hope to see you all at the next event unless that next event is too soon like tomorrow or something .
.
Nanotwo kit:
no real URL for this except the thread where rory announced it or the email address you send your order to
Battery Bag(apparently you need one of these):
https://hobbyking.com/en_us/lithium-pol ... -sack.html
LiPo Charger:
https://hobbyking.com/en_us/turnigy-12v ... arger.html
Power for the charger:
https://www.amazon.co.uk/Kasstino-Adapt ... wer+supply
LiPo:
https://hobbyking.com/en_us/turnigy-nan ... tore=en_us
Flipper Servo:
https://hobbyking.com/en_us/turnigytm-t ... tore=en_us
1.5mm Polycarb:
http://www.ebay.co.uk/itm/LEXAN-POLYCAR ... 53e5d55427
1mm Aluminium
http://www.ebay.co.uk/itm/like/26124836 ... 0213340945
Transmitter:
https://www.amazon.co.uk/gp/product/B00 ... UTF8&psc=1
I've read around and I'm 90% sure that this will all work together. the aluminium is for the tips of each wedge so that I can sharpen it and have a nice low ground clearance. I do still have a couple questions though as I don't wanna spend money on something and then find out that I needed something else and I wasted it or that I missed something crucial. so in no particular order;
1. Do I need some sort of switch or link for safety and does the Nanotwo kit come with anything like that already?
2. if not then would I need a soldering iron to attach one? as I don't currently own one.
3. is the LiPo charging bag something that's definitely required or is it just there for people who worry too much?
4. How would I attach one of those linkage rods to the servo and flipper? would I need a hook-ey type thing on the flipper or something else?
Alright I think that's everything. Please let me know what you think and if there's anything that you'd do differently. if nobody comes in and tells me to stop what I'm doing immediately because I've made a terrible mistake in component choice or it's gonna explode or something then I'll probably order everything and get started building it in a week or so. So stay tuned for more riveting action such as me asking how to do a thing or posting a drawing of how I will accomplish a thing. and I'll hope to see you all at the next event unless that next event is too soon like tomorrow or something
Harry

Re: Help/Build diary for/of my first antweight.
This list looks pretty good to me, but to answer your questions;
1) You need a way of turning off the power without using tools to disassemble the robot. This can be a link, a switch, or even having the ability to unplug the battery by lifting up the flipper panel. I would recommend a switch as removing the battery every fight is a pita. The nanotwo doesn't come with a switch but a small slide switch should do, I use the ones sold by Shakey on the forum here.
2) Yes you will need a soldering iron for this, a cheap one will do fine, but make sure it has a small tip, because antweight components are small! (if you've not soldered before its worth practicing on some loose wires before doing the ant, but its easy once you get the hang of it)
3) Yes get one. Worst case scenario a lipo fire could burn your house down, a few quid is well worth it for safety.
4) I've not personally built a flipper, but I've seen people use a bit of wire (bent paperclip?) to connect it up.
To get the front of the flipper low to the ground most people use a thin bit of acetate stuck to the flipper that scrapes the floor. Search for acetate sheet or ohp paper on ebay.
Good luck with the build, the design look nice!
1) You need a way of turning off the power without using tools to disassemble the robot. This can be a link, a switch, or even having the ability to unplug the battery by lifting up the flipper panel. I would recommend a switch as removing the battery every fight is a pita. The nanotwo doesn't come with a switch but a small slide switch should do, I use the ones sold by Shakey on the forum here.
2) Yes you will need a soldering iron for this, a cheap one will do fine, but make sure it has a small tip, because antweight components are small! (if you've not soldered before its worth practicing on some loose wires before doing the ant, but its easy once you get the hang of it)
3) Yes get one. Worst case scenario a lipo fire could burn your house down, a few quid is well worth it for safety.
4) I've not personally built a flipper, but I've seen people use a bit of wire (bent paperclip?) to connect it up.
To get the front of the flipper low to the ground most people use a thin bit of acetate stuck to the flipper that scrapes the floor. Search for acetate sheet or ohp paper on ebay.
Good luck with the build, the design look nice!
Team Zero - AWS 58 Champion!
Zero - rambot - - Axiom - axebot - - Valkyrie - drum spinner
Blueprint - rambot - - Vampire - horizontal spinner - - Particle - ???
RBMK - quad spinner gyro walker - - Duality - dual spinner gyro walker
Zero - rambot - - Axiom - axebot - - Valkyrie - drum spinner
Blueprint - rambot - - Vampire - horizontal spinner - - Particle - ???
RBMK - quad spinner gyro walker - - Duality - dual spinner gyro walker
-
Occashokka
- Posts: 433
- Joined: Sun Nov 30, 2014 9:34 pm
- Location: Stroud,Gloucestershire
Re: Help/Build diary for/of my first antweight.
Yea I use bent piano wire which is just thick paperclips, the servo horn usually has holes in it you can widen out or poke it through and then you just have to make a loop on the underside of the flipper plate to bend it through
Team Badger
Has a 3d printer now yay
-£4.82+VAT (intact)
-cool modulated printed thingy
-not yet built nasty mean spinnt thingy
I'm gonna build something huge and stupid, try and stop me
Has a 3d printer now yay
-£4.82+VAT (intact)
-cool modulated printed thingy
-not yet built nasty mean spinnt thingy
I'm gonna build something huge and stupid, try and stop me
Re: Help/Build diary for/of my first antweight.
Alright,
so it's been a while. But I'm back! I now have more time and money to divert to building this antweight and I've been watching the footage of AWS' and ant freezes biding my time and figuring out my design.
I have bought all the bits from my previous shopping list save for a few changes;
I replaced the now discontinued pink turnigy servo with the kingmax one that Limahotel was talking about in his build thread,
I've opted not to go with the nanotwo kit as I never catch the store with it in stock so instead I've gone with the brandless chinese 2s-3s 5a esc and a lemon rx.
apart from that I'm staying the course and when everything comes in I'll assemble it and give it all a test. I'll probably post when I have all the bits just to check with experienced people that I'm setting it up correctly.
so it's been a while. But I'm back! I now have more time and money to divert to building this antweight and I've been watching the footage of AWS' and ant freezes biding my time and figuring out my design.
I have bought all the bits from my previous shopping list save for a few changes;
I replaced the now discontinued pink turnigy servo with the kingmax one that Limahotel was talking about in his build thread,
I've opted not to go with the nanotwo kit as I never catch the store with it in stock so instead I've gone with the brandless chinese 2s-3s 5a esc and a lemon rx.
apart from that I'm staying the course and when everything comes in I'll assemble it and give it all a test. I'll probably post when I have all the bits just to check with experienced people that I'm setting it up correctly.
Harry
Re: Help/Build diary for/of my first antweight.
also one more thing I just realised but have no idea if it's feasible/ possible
my original idea with the double flipper is that the front hinged end would be the primary flipper with the better wedge and all that but the rear hinged wrap around area would be behind but would have a steeper wedge that could be good for deflecting spinners. the only issue is if I want to play defence and use my rear end against spinners the controls are going to be backwards. would there be a way to implement some sort of "switch" to invert the drive and turning of the esc? or should I just get good at driving backwards?
my original idea with the double flipper is that the front hinged end would be the primary flipper with the better wedge and all that but the rear hinged wrap around area would be behind but would have a steeper wedge that could be good for deflecting spinners. the only issue is if I want to play defence and use my rear end against spinners the controls are going to be backwards. would there be a way to implement some sort of "switch" to invert the drive and turning of the esc? or should I just get good at driving backwards?
Harry

Re: Help/Build diary for/of my first antweight.
On a good enough transmitter (Devo 7e inclusive) you can absolutely reverse your controls on a switch... Though don't ask me how!
I know many people in here could help you out with that though (and I'd be curious to know as well). I also know many people who have implemented said switch solution wind up forgetting about it / getting tripped up by it. It's definitely "better" to just get good at driving backwards (keep it simple, innit), but there are hardware solutions.
Good luck!
I know many people in here could help you out with that though (and I'd be curious to know as well). I also know many people who have implemented said switch solution wind up forgetting about it / getting tripped up by it. It's definitely "better" to just get good at driving backwards (keep it simple, innit), but there are hardware solutions.
Good luck!
A grabber? I CHALLENGE IT WITH JIGGY!
Re: Help/Build diary for/of my first antweight.
Ok so I'm back again, found some more time to work on the bot even though I've had the bits sitting about for ages.
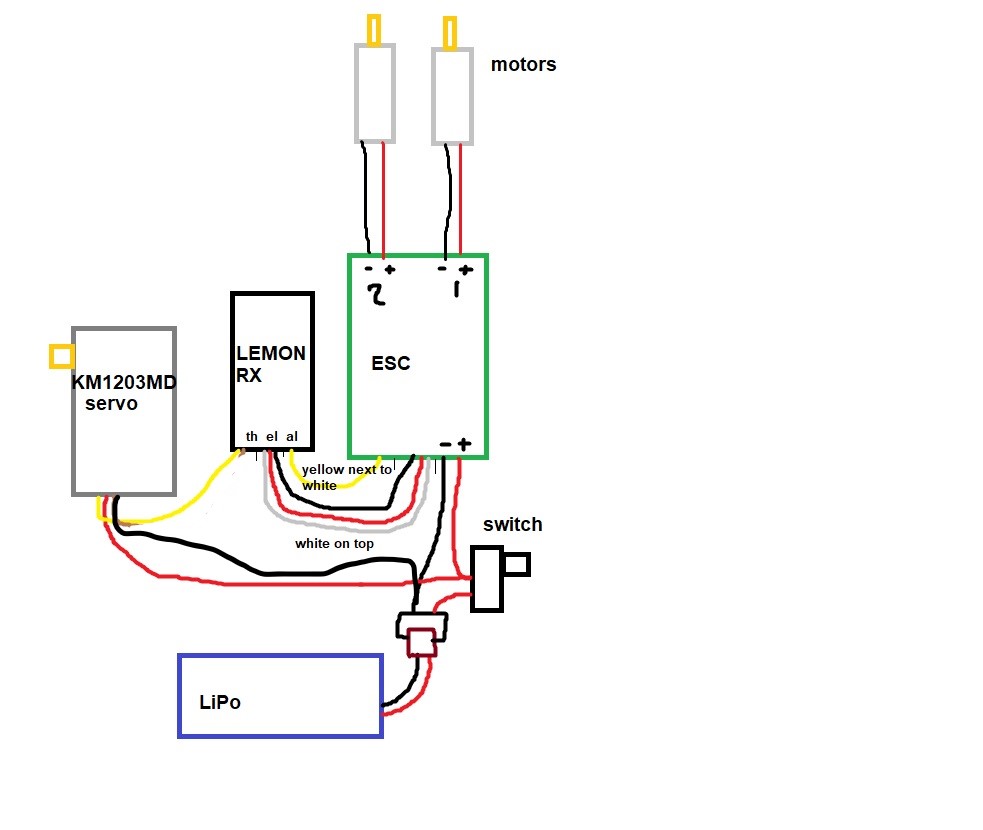
I drew up this Wiring diagram and wanted some input before putting it all together.

the ESC I'm using is this: https://www.aliexpress.com/i/4000202869686.html it has onboard channel mixing so I'm pretty sure that the white wire is forward and back and the yellow is left and right with the red and black being power and ground.
I think I need to power the servo off of the battery directly as opposed to off of the reciever otherwise it'll only be getting 5volts but maybe someone could confirm I've got that right.
do all of your robots have everything soldered together or do you use pins and connectors? I've got a pinless Rx and am just gonna cut the connectors off of the esc and solder directly onto the motors. is this a good idea or will it cause issues when I wanna repair the bot?
Thanks all
I drew up this Wiring diagram and wanted some input before putting it all together.
the ESC I'm using is this: https://www.aliexpress.com/i/4000202869686.html it has onboard channel mixing so I'm pretty sure that the white wire is forward and back and the yellow is left and right with the red and black being power and ground.
I think I need to power the servo off of the battery directly as opposed to off of the reciever otherwise it'll only be getting 5volts but maybe someone could confirm I've got that right.
do all of your robots have everything soldered together or do you use pins and connectors? I've got a pinless Rx and am just gonna cut the connectors off of the esc and solder directly onto the motors. is this a good idea or will it cause issues when I wanna repair the bot?
Thanks all
Harry

Re: Help/Build diary for/of my first antweight.
Looks like it will probably work.
Check that the servo can run off the maximum battery voltage (e.g. 2S lipo = 8.4v) otherwise you'll blow it. I assume it's a "high voltage" servo, then it will be fine.
I see your brown wire - the GND / negative power to the servo - which you've shown going through the receiver board. This will probably work but is not necessary, and may mean that more current is going through the rx board than ideal. Consider routing the black / gnd / negative directly to the battery.
I find when doing electronics, it's easy to forget that any current which goes out from the positive terminal, needs to return on the negative. This:
Check that the servo can run off the maximum battery voltage (e.g. 2S lipo = 8.4v) otherwise you'll blow it. I assume it's a "high voltage" servo, then it will be fine.
I see your brown wire - the GND / negative power to the servo - which you've shown going through the receiver board. This will probably work but is not necessary, and may mean that more current is going through the rx board than ideal. Consider routing the black / gnd / negative directly to the battery.
I find when doing electronics, it's easy to forget that any current which goes out from the positive terminal, needs to return on the negative. This:
Robots: Betsie - RaspberryPi controlled flipper bot with gyro stablisation - too clever for her own good?
Stacie - tidy flipper; 4wd driven by hair bands
Stacie - tidy flipper; 4wd driven by hair bands