
There are three wires to connect. Two for power, and the third carries signals for all channels.
Typically there's a dupont connector with three pins, gnd, power, signal. This is mechanically same as a servo, except it is electrically different. The ESC provides power to the RX (just like the Dasmikro, etc)
Look at your rx manual. In some RXs the "bind plug" doubles up as a PPM or serial interface.
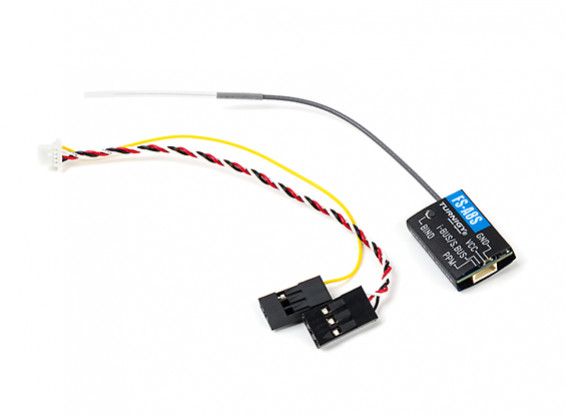
During testing, I used Turnigy / Flysky receivers, incuding this one
https://hobbyking.com/en_us/fs-a8s-2-4g ... tore=en_us
Which is incredibly tiny and light - it has a tiny little connector but comes with a lead that has normal 0.1" dupont connector on the other end.
If you look at this product picture (Hobbyking)
https://cdn-global-hk.hobbyking.com/med ... 5267_1.jpg
You'll see the type of connector. The yellow wire is for PPM, the white for ibus / sbus, and the red/black carry power. You only need the yellow *or* white, not both, so could snip the yellow (I prefer the ibus as it's fully digital and gives the values in microseconds-equivalent-pulse).
Flysky transmitters have an option in the menu to tell the rx whether to use ibus or sbus - they use the same pin but not at the same time.
Sbus is used on other brands of rx too, for example on the Frsky stuff. I haven't tested it yet because I don't have one, but I expect it's very similar.
EDIT: Update: unfortunately the Malenki-ESC is not working too well, it runs ok off USB power or a bench supply, but Lipos seem to sometimes make the microcontroller go pop, I think I need to change the power circuitry.
Malenki-ESC open source Antweight ESC
Moderators: BeligerAnt, petec, administrator
Re: Malenki-ESC open source Antweight ESC
Robots: Betsie - RaspberryPi controlled flipper bot with gyro stablisation - too clever for her own good?
Stacie - tidy flipper; 4wd driven by hair bands
Stacie - tidy flipper; 4wd driven by hair bands
Re: Malenki-ESC open source Antweight ESC
Hi,
It seems the Malenki-ESC is now working a lot better.
* It does bot - I've built part of my next bot and it's driving just fine with 2 N20s.
- I've built part of my next bot and it's driving just fine with 2 N20s.
* I solved the voltage regulation problem which caused 2 mcus to be destroyed
If I make a *small* number of these boards, does anyone want to test one? I can probably ship them out for about £8 (NB: This is the prototype price, there is no guarantee that they could be volume made for this price)
I will need to order some parts soon, so I'm trying to gauge interest.
It seems the Malenki-ESC is now working a lot better.
* It does bot
* I solved the voltage regulation problem which caused 2 mcus to be destroyed
If I make a *small* number of these boards, does anyone want to test one? I can probably ship them out for about £8 (NB: This is the prototype price, there is no guarantee that they could be volume made for this price)
I will need to order some parts soon, so I'm trying to gauge interest.
Robots: Betsie - RaspberryPi controlled flipper bot with gyro stablisation - too clever for her own good?
Stacie - tidy flipper; 4wd driven by hair bands
Stacie - tidy flipper; 4wd driven by hair bands

Re: Malenki-ESC open source Antweight ESC
Would absolutely be interested in trying one - what kinda rx would I need to make the fancy 1 wire signal thing work? I usually use lemons, do you know if their bind pin would support it?
A grabber? I CHALLENGE IT WITH JIGGY!
Re: Malenki-ESC open source Antweight ESC
Do you have a link to the datasheet?
Robots: Betsie - RaspberryPi controlled flipper bot with gyro stablisation - too clever for her own good?
Stacie - tidy flipper; 4wd driven by hair bands
Stacie - tidy flipper; 4wd driven by hair bands

{kind=link}
Re: Malenki-ESC open source Antweight ESC
i may consider one... but R2 would definitely have to be the right way up... i cannot afford to lose any electrons 
Team Rocket
Trappist 1(4wd grab 'n' lift)
Ton 618 (4wd expanding bot)
Io(4wd flipper)
Trappist 1(4wd grab 'n' lift)
Ton 618 (4wd expanding bot)
Io(4wd flipper)
-
Paulmchurd
- Posts: 227
- Joined: Sun Dec 10, 2017 4:39 pm
Re: Malenki-ESC open source Antweight ESC
More then happy to give this a test!!! I’ll have to get my hands on a single wire RX though.
-
MySolderIsOlder
- Posts: 190
- Joined: Mon Jul 30, 2018 1:22 pm
- Location: Kent
Re: Malenki-ESC open source Antweight ESC
Hi Mark,
I'd love to test one! I have one spare cPPM-equipped Orange RX 614, which could make for a very neat little combo.
Cheers,
Stuart
I'd love to test one! I have one spare cPPM-equipped Orange RX 614, which could make for a very neat little combo.
Cheers,
Stuart
Stuart (Tony's dad)
Re: Malenki-ESC open source Antweight ESC
Sounds like there is enough interest for me to knock up a batch. I'll let you know when they're ready and we can sort out the details (it will not be really soon, I need to order more parts, the boards are in the post).
There are also a few more tweaks to the firmware that I'd like to do.
There are also a few more tweaks to the firmware that I'd like to do.
Robots: Betsie - RaspberryPi controlled flipper bot with gyro stablisation - too clever for her own good?
Stacie - tidy flipper; 4wd driven by hair bands
Stacie - tidy flipper; 4wd driven by hair bands
Re: Malenki-ESC open source Antweight ESC
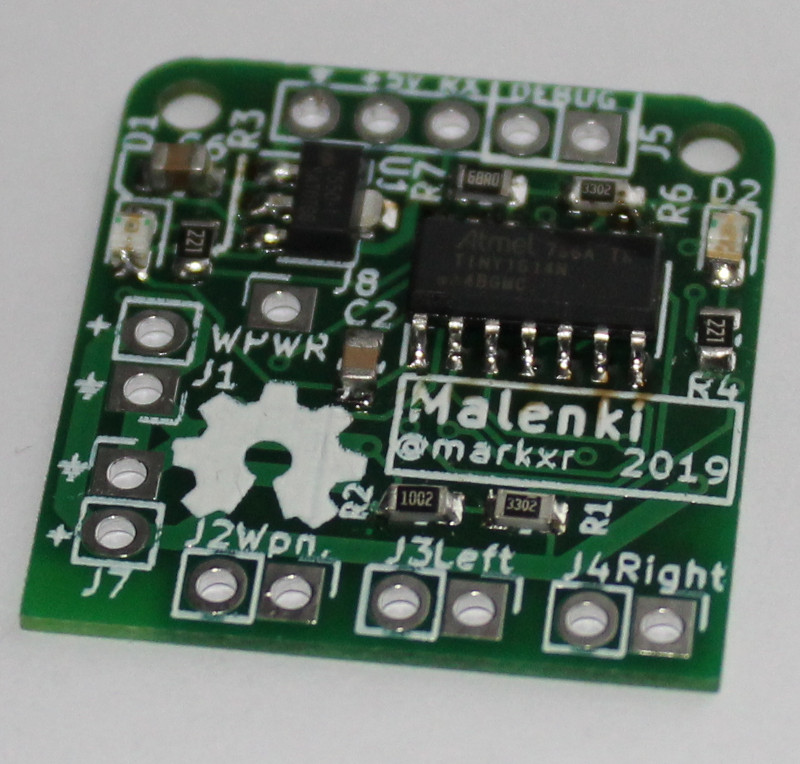
Parts are here, I have made a couple of the boards so far. It all seems to approximately work, the firmware at least drives my test robot around.
If anyone wants one, please PM me, I can make up about 9ish boards with the parts I have right now.
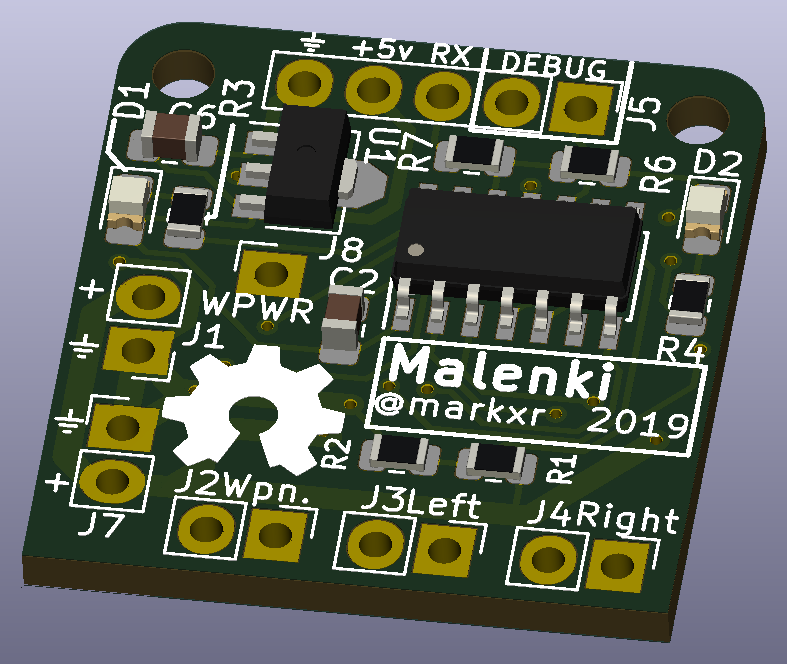
NB: You need a receiver which supports CPPM, S-bus or I-bus. You will also need to solder those pins shown above, but it is much easier than the Dasmikro because there are actual holes in the board (0.1" pitch). Depending on the receiver, it might be possible to solder 90 degree pin headers into the three top pins (GND, 5V, RX) and just plug the rx directly in. The board is approximately 25 * 26mm and has parts on both sides.
Robots: Betsie - RaspberryPi controlled flipper bot with gyro stablisation - too clever for her own good?
Stacie - tidy flipper; 4wd driven by hair bands
Stacie - tidy flipper; 4wd driven by hair bands