peterwaller wrote:Here is a quick video of my Leming Nanobot but you still don't get the scale. https://youtu.be/jqnVIo8jXWg
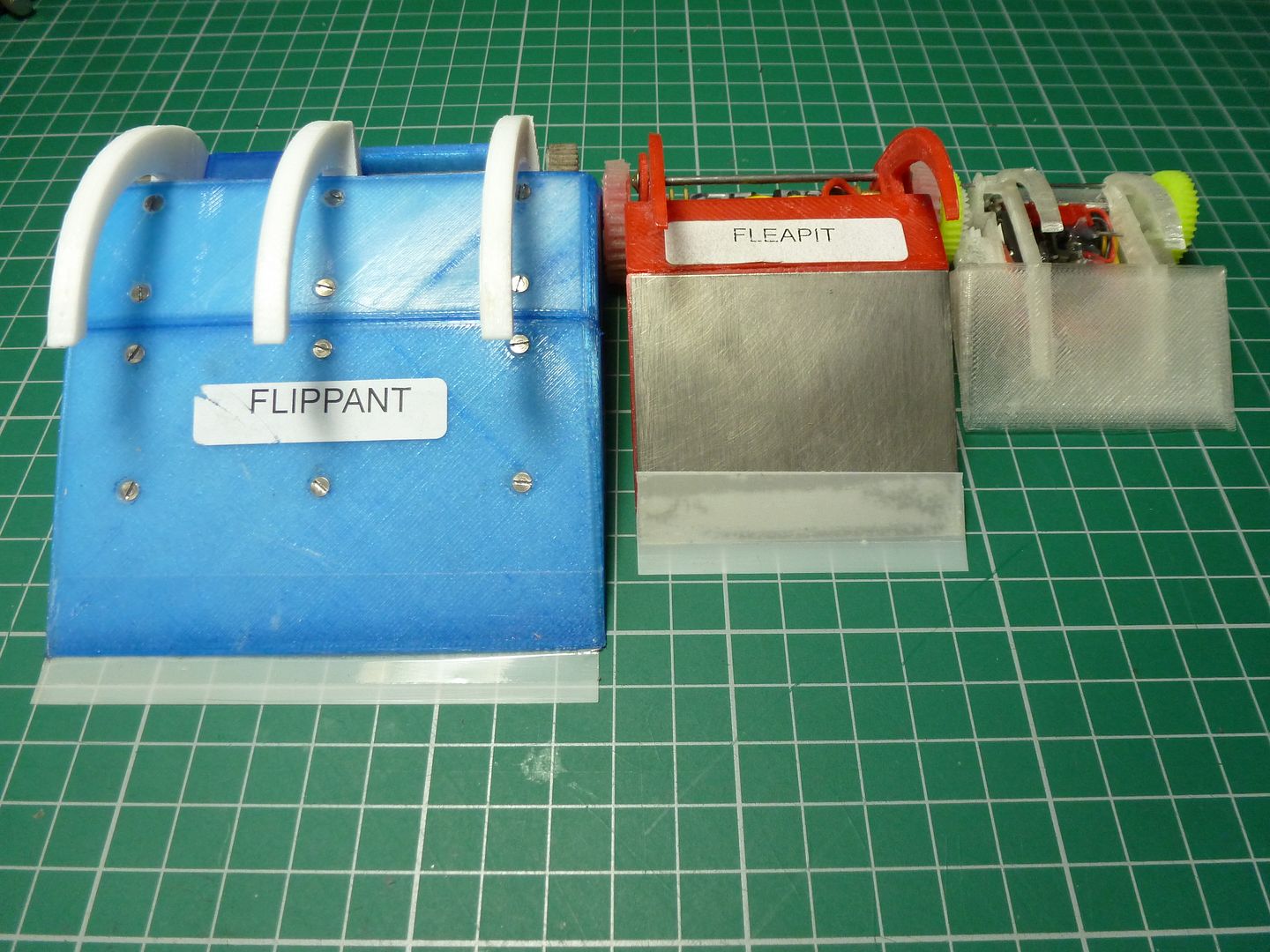
So here is a picture against an Ant and a Flea.
Both of those help a lot - thanks, Peter!
How much do Flea and Nano Bots cost you to build in comparison to your ants? I'm guessing that they are around about the same when it comes to building a robot under 150 grams?
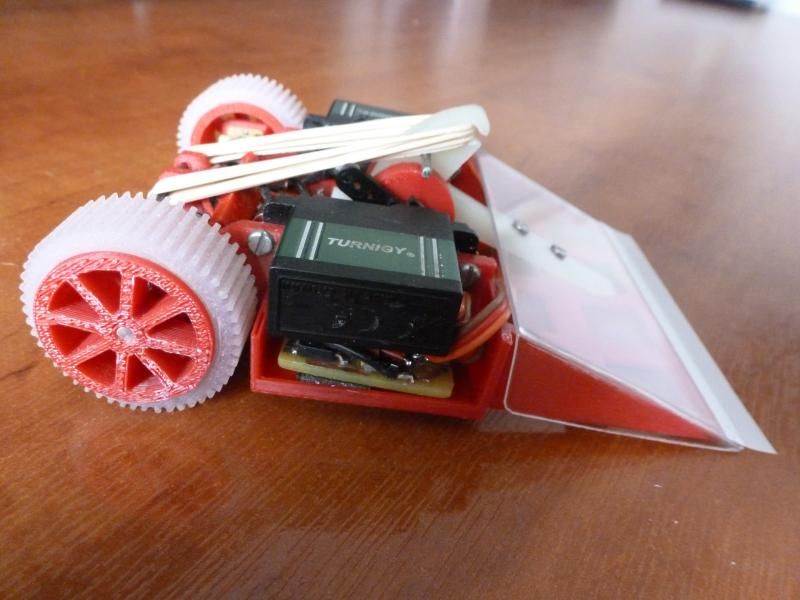
It is an elastic powered flipper.
Two slowish but powerful servos force the flipper down against the elastic where it latches then the controller returns the servos almost to the other end of the travel.
When I fire the flipper the servos travel to the end releasing the catch and then the controller automatically rests it again ready for the next flip.
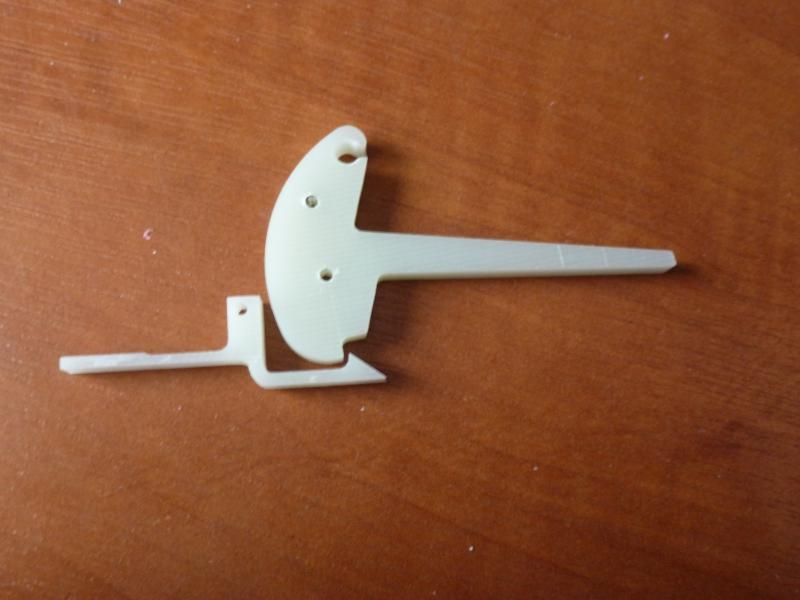
Here is the cam and latch mechanism.
Yes its an antweight I have had several attempts at this type of flipper and I expect I shall have several more.
It was working quite well and was the first not to flip itself but kept failing to reset after a few goes.
I actually had a look at it a couple of weeks ago and noticed one of the servos was stopping working when it got warm.
I use the Rx47 as per: http://www.deltang.co.uk/rx47a-v611.htm
If you look at the previous page of this thread you can see how I modify it to be plug in so a commercial loom can be used.
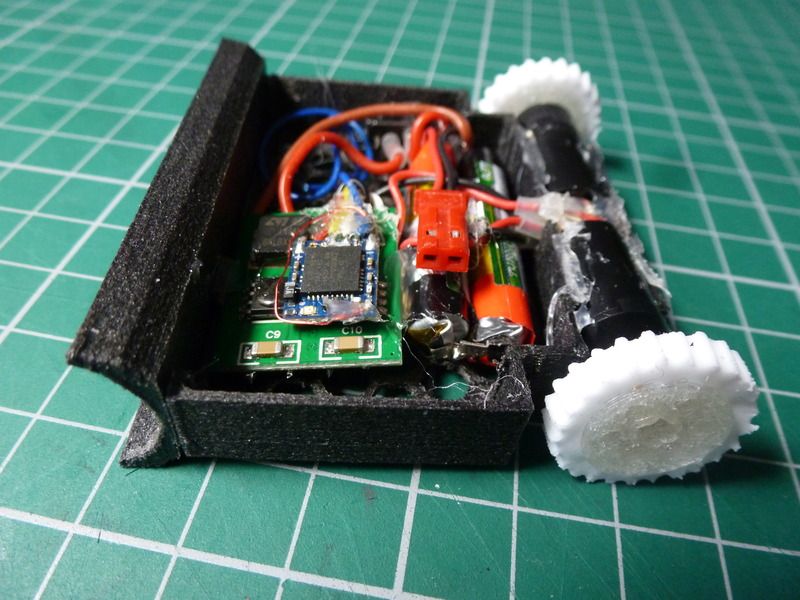
Here is the Nano I have built using the new gear motors and bang good receiver and controller that I was discussing under the Resource Website / ebay gear motors.
It was more a platform to try out the components than a serious attempt at a competitive nano.
Here you can see how slow it is. https://youtu.be/NKYqw44zgcE
But at least it has some power. https://youtu.be/uW44UxRlVBA
I did strip one of the gearboxes down but surprisingly it is a single stage epicyclic gearbox so no chance to change the gear ratios.
I might try it in a flea with much larger wheels to see what sort of speed I can get.