I'm pretty sure there's something incredibly clever like counter rotating crankshafts in there to virtually eliminate up and down motion on the leg so it doesn't bounce. Although I could be completely wrong about that.
You can also always add more feet to make it nearly as smooth as wheels which is significantly easier to get your head around.
Hello, Im new to Antbots
Moderators: BeligerAnt, petec, administrator
-
TheAntTrap

- Posts: 59
- Joined: Fri Aug 27, 2010 9:56 am
- Location: Geneva, Switzerland and Sweden
-
bitternboy

- Posts: 759
- Joined: Sat Jun 06, 2009 7:36 pm
- Location: Sheffield
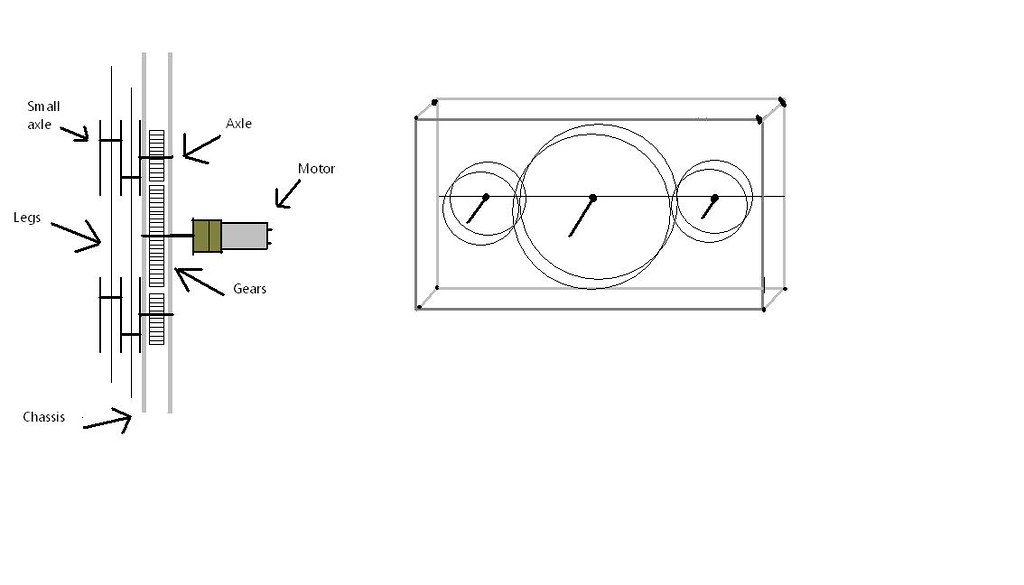
I made a spinner prototype using some old gears I had lying around which was basically four legs, each connected to a rotating gear halfway up and two sliders at the higher end restricting any horizontal movement at the top. The result was a fairly realistic leg movement that worked upsidedown; it sounds complicated but was really very simple. Didn't work in the slightest, it bucked and wobbled around since it's leg cycle was too large even though it looked fairly impressive otherwise.
Jonathan Atkinson
Before you criticize another person, first walk a mile in their shoes. Then, when you critisize them, you'll be a mile away and have their shoes.
Before you criticize another person, first walk a mile in their shoes. Then, when you critisize them, you'll be a mile away and have their shoes.

-
Remote-Controlled Dave
- Posts: 3716
- Joined: Sun Apr 03, 2005 5:30 pm
- Location: Antrim, Northern Ireland
- Contact:
Walkers don't have to be so complicated. Here's a prototype I built one time. Simplest walking mechanism ever, still worked well.
http://www.youtube.com/watch?v=Kh8FwkLUd1Y
http://www.youtube.com/watch?v=Kh8FwkLUd1Y
Die Gracefully Robotics
Winner - AWS 39
Winner - AWS 39
-
peterwaller

- Posts: 3213
- Joined: Fri Feb 15, 2002 12:00 am
- Location: Aylesbury Bucks
- Contact:
Speed seems to be the last thing you need with the cam type walkers as above a certain speed they tend to bounce on the spot and don't move any where.
There are ways of reducing the amount of up down movement I think Andrew Hibberd is probably the expert on that.
I have started trying to draw up that really neat walking method to see if I can first understand it and second scale it down for use in an Ant.
There are ways of reducing the amount of up down movement I think Andrew Hibberd is probably the expert on that.
I have started trying to draw up that really neat walking method to see if I can first understand it and second scale it down for use in an Ant.
-
Remote-Controlled Dave
- Posts: 3716
- Joined: Sun Apr 03, 2005 5:30 pm
- Location: Antrim, Northern Ireland
- Contact:
That was at full speed, yeah, on 100:1 motors and 7.4v. I found if it went any quicker then the legs would just flail around instead of walking.
Just to point out I built that chasis about 2 years ago, it has been dismantled since. Just wanted to show that it doesn't have to be precise engineering to make a walker.
Just to point out I built that chasis about 2 years ago, it has been dismantled since. Just wanted to show that it doesn't have to be precise engineering to make a walker.
Die Gracefully Robotics
Winner - AWS 39
Winner - AWS 39